





Check this spreadsheet for current swerve module lead times.
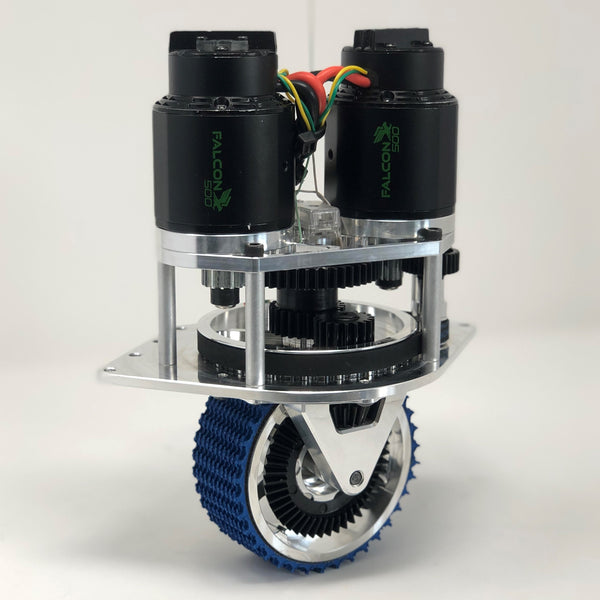
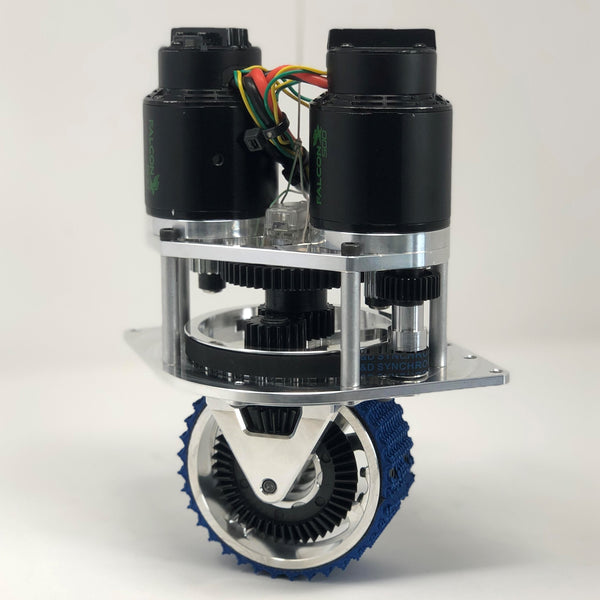
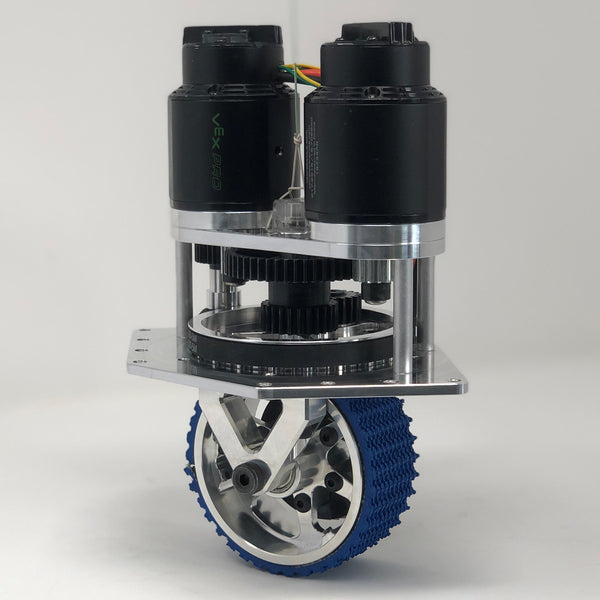
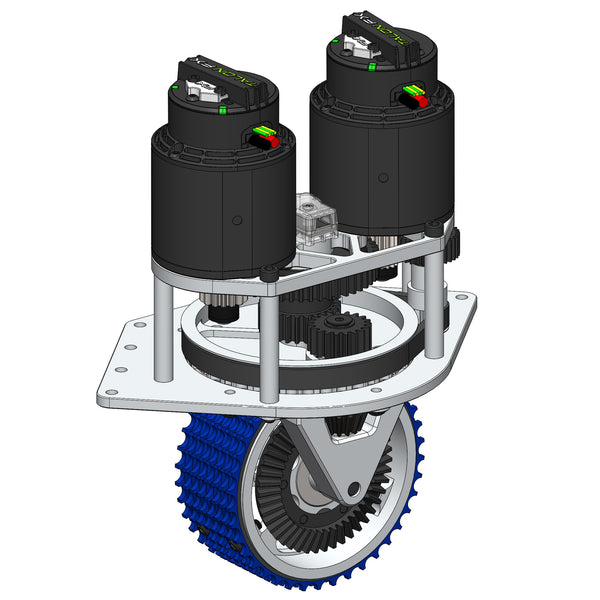
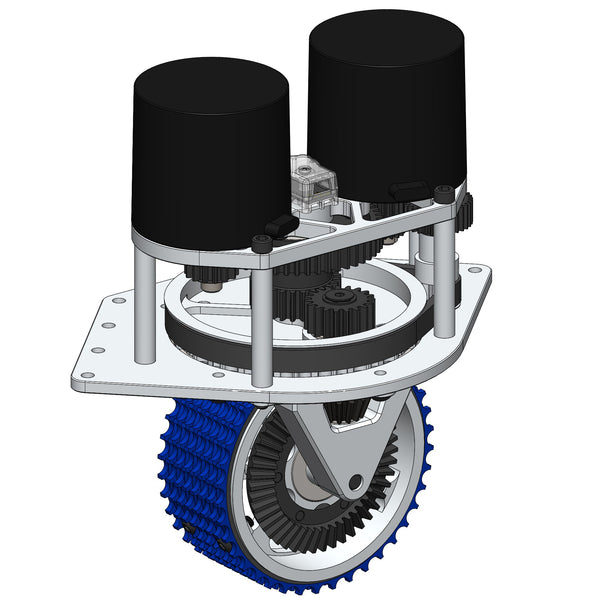
The MK4 is an upgraded version of our popular MK3 module. The MK4 features our 1.5" width Billet Wheel. Because of the 50% increase of width, greater tread life and slightly better traction can be expected. This module now ships with black neoprene tread (blue nitrile is pictured), which extends the tread life even further. To accommodate the new wheel the MK4 uses our new 2nd Generation bevel gear set.
Despite it being one of the most compact and lightweight modules available, the MK4 module does not compromise on robustness. MK4 modules use all steel gears for superior wear resistance. Under typical use, the modules will be able to handle multiple seasons of robotics competition. In order to keep weight to a minimum, the steel gears are pocketed.
Like the MK3, the MK4 uses a centrally located steering encoder to directly measure steering angle without the use of gears. This eliminates encoder backlash and reduces part count.
The MK4 module ships unassembled, and the following components are not included:
- Drive motor (REV Robotics NEO, REV Robotics NEO Vortex, VEX Falcon 500, or WestCoast Products Kraken X60 recommended)
- Steering motor (REV Robotics NEO, REV Robotics NEO Vortex, VEX Falcon 500, or WestCoast Products Kraken X60 recommended)
- Steering encoder (CTRE CANcoder, Thrifty Absolute Magnetic Encoder, Redux HELIUM Canandcoder, or equivalent)
- Optional: Use these Motor Risers to not have to otherwise reduce the length of both motor shafts by approximately 0.25".
Note: The above steering encoders come with the ⌀.250”x 0.500” magnet that gets installed in the Swerve Module's Center Column. That magnet is not included in the Swerve Module kit.
The MK4 is also compatible with VersaPlanetary gearboxes with CIM output shafts. CIM motors are not compatible with the MK4 due to their larger diameter.
The steering gear ratio of the MK4 is 12.8:1 The MK4 is available in 4 different drive gear ratios. The table below shows the drive gear ratios and free speeds with NEO and Falcon 500 motors. L1 and L2 ratios are the most popular ratios and are suitable for standard full weight competition robots. The L3 ratio is more aggressive and is recommended for light weight robots. The L4 ratio is very aggressive and is only recommended for very light weight mini bots.


The module easily mounts to common 2X1 frame material. The module typically mounts on top of the robot chassis, however, there is also clearance to mount the chassis on top of the module to maximize ground clearance.
Please note:
- The NEO or NEO Vortex kit works for the NEO and NEO Vortex motors with the 8mm keyed shaft.
- The Falcon 500 kit is primarily for the Falcon 500 motor. It can also work for the NEO Vortex motor with the Falcon spline shaft, but the shaft spacers are not included (they are supplied with the Falcon motors). Going this route for the NEO Vortex utilizes a splined steering pinion gear, so no press/slip fit is needed there.
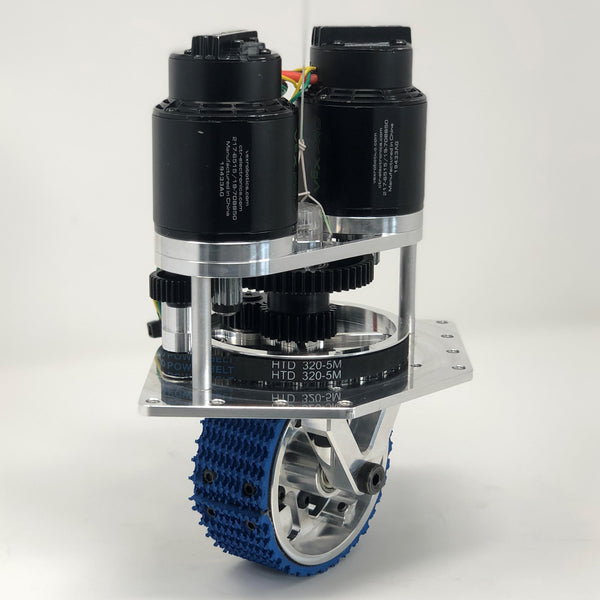
Starting the week of 12/20/21 MK4 modules have been upgraded to the 15mm width belt and corresponding base pulley that was introduced with the MK4i module. Modules shipped prior to the week of 12/20/21 will have the original 9mm width belt and pulleys.
Effective 7-Aug-2023 at 12:01 am PT: This swerve module will ship (regardless of the order date) with an updated Intermediate Shaft (V3), Base Pulley (V3) and upper bearing (non-flanged) for the shaft. Details:
- The collective change enables the flanged bearing supporting the top of the Intermediate Shaft to be replaced with a non-flanged bearing. That bearing can consequently only be installed in the updated Base Pulley one way to help ensure the swerve module is assembled correctly.
Weight:
- MK4 module with NEO motors - 4.9 pounds
- MK4 module with Falcon 500 motors - 5.2 pounds
CAD Files:
Layout Drawing:
Parts List
Assembly Guide:
MK4 Assembly Video:

